Research Projects
2023
Soft Optical Sensor and Haptic Feedback System for Remote and Robot-Assisted Palpation

I developed a soft optical sensor integrated with a wearable haptic glove for tumor detection during robotic palpation. The sensor contains an array of optical waveguides that can detect the presence of tumors embedded within a tissue phantom. Detection of a tumor results in an optical loss from the waveguide signal, triggering proportional inflation of the soft microfluidic actuators in the glove. The inflation of each actuator is proportional to the incident loss on the palpation sensor array, which is dependent on tumor depth.
This work was presented at the IEEE International Conference on Intelligent Robots and Systems (IROS), 2023.
2022
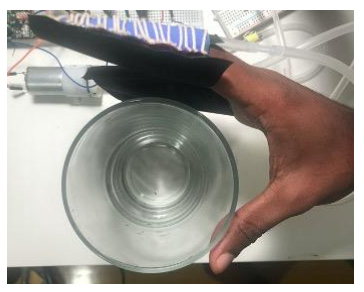
A Soft Robotic Haptic Feedback Glove for Colonoscopy Procedures
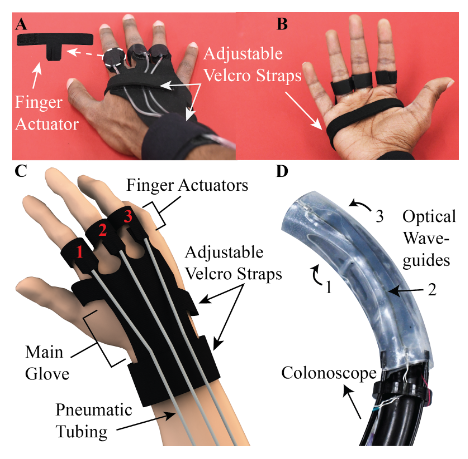
I created a soft robotic glove that provides haptic feedback to the surgeon's hand during interventional endoscopy procedures, specifically colonoscopy. The glove is connected to a force sensing soft robotic sleeve that is mounted onto a colonoscope. The glove consists of pneumatic actuators that inflate in proportion to the incident forces on the soft robotic sleeve. Thus, the glove can alert the surgeon of potentially dangerous forces exerted on the colon wall by the colonoscope during the navigation.
This work was presented at the IEEE International Conference on Intelligent Robots and Systems (IROS), 2022 and the 14th Hamlyn Symposium on Medical Robotics, 2022.
2022
A Soft Sensor for Bleeding Detection in Colonoscopies

I developed a soft sensor that can detect the presence of blood at the bleeding site during colonoscopies. The sensor consists of optical waveguides that interface with a microfluidic channel. Blood flow causes absorption and scattering of incident light that can be picked up by the optical sensing apparatus via light transmission through the waveguide. The surgeon can be alerted when bleeding occurs through a graphical user interface.
This work was published in Advanced Intelligent System, 2022 and featured on the cover of the journal
2021
A Soft Robotic Sleeve for Safer Colonoscopy Procedures

I helped design a soft robotic sleeve that provides force feedback for safe navigation during colonoscopy. The robot can be mounted around existing colonoscopes instrumentation as a disposable “add-on,” avoiding the need for dedicated or customized instruments. The device integrates soft optical sensors to monitor contact interaction forces between the colon and the colonoscope and soft robotic actuators that can be automatically deployed if excessive force is detected, to guarantee pressure redistribution on a larger contact area of the colon.
This work was published in IEEE Robotics and Automation Letters (RA-L), 2021 and was presented at the 4th IEEE International Conference on Soft Robotics, 2021.
Academic Projects
2022
Automated Loading and Imaging of Microtiter plates
As part of my ME560 Precision Machine Design course, I helped create an automated mechanism that can load and image microtiter slides for bio-analysis. I specialized in designing a bi-axial microscope imaging sub assembly using linear drives. We also prepared performance calculations, financial justifications, and bills of materials (BOMs) to meet our customers’ requirements.

2021
Image Classification of COVID-19 X-rays
As part of my CS 542 Principles of Machine Learning course, I trained various deep learning architectures to classify X-ray data i.e., COVID-19, Normal, Bacterial Pneumonia, and Viral Pneumonia. In this project, I evaluated the performance between a pre-trained VGG16 model and MobileNet V2 model.

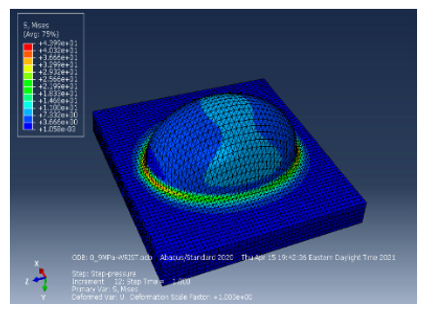
Soft Robotic Glove for Robotic Surgery
2021
As part of my ME568 Soft Robotics course, I developed a soft robotic glove for haptic feedback in robotic surgery. The glove consists of soft pneumatic actuators and a sensing system of soft optical waveguides that can be wrapped across surgical robotic instruments. The pneumatic actuators inflate when the soft optical waveguides detect an incident force. Specific actuators embedded on the glove can be deployed depending on the nature and location of the incident deformation on the waveguide sensor. I also performed a finite element analysis of the glove’s actuators to determine their behavior under inflation and discern the stress concentrations in different regions. This project served as a precursor to my research in haptics.

Soft Robotic Textile Glove for Rehabilitation
2020
As part of my ME571 Medical Robotics course, I developed a portable glove that can help provide rehabilitative therapy to stroke and spinal cord injury patients. The glove contains textile multilayers that bend the finger in a desired direction upon pressurization of the embedded actuator. The objective was to induce the patient to perform grasping motions via the aid of the soft robotic glove, as part of a repetitive task therapy rehabilitation program.